Passive Knee Exoskeleton
Objectives
Develop a passive exoskeleton knee joint using a spring mechanism to help with rehabilitation for running and biking
- Wearable: lightweight, comfortable, does not limit motion
- Reliable: works for both running and biking, durable
- Effective: consistent gait for longer periods of time
Background
Exoskeletons are used to reduce energy consumption and muscle activation to delay fatigue and increase endurance. Passive exoskeletons do this by converting gravitational potential energy and motion energy to replace force on joints.
Gait and Biomechanics
Gait, which characterizes human walking, running, and biking, is divided into two phases: support/stance phase and swing phase. The stance phase is when a part of the foot is in contact with the ground, and the swing phase is when the foot leaves the ground and moves forward.

Mechanical Design
The exoskeleton consisted of 6 main components: thigh plate, calf plate, spring housing, 3 mounting plates, spring, and mounting straps. The parts were designed in SolidWorks and were manufactured using 3D printing and waterjet cutting. Because of wearability, the entire device weighed 0.5 kg, making it light and easily mountable to someone's leg.
Spring Mechanism
The spring mechanism is the innovation behind the exoskeleton, and it consists of a torsion spring inside two identical housing components. This mechanism stores energy when bent and releases energy during extension, allowing the exoskeleton to bear some of the force during impact and assist with extension when pushing off the ground.

Testing Procedure and Setup
To test the device, I set up four trials for running and biking with and without the exoskeleton and recorded 30 seconds of data after 5 minutes of running or biking. To collect data, I used an MPU-6050 IMU and FSR in the circuit shown to the right. The IMU, attached to the shin with the z-axis aligned vertically, measured acceleration and angular velocity by estimating stride frequency. The FSR measured force to assess the impact on the ground or pedals at the ball of the foot. Using an Arduino UNO, I was able to collect real-time data. From here, I completed MATLAB-based signal processing, filtering, and sensor calibration. This allowed me to store the data and plot the force, z-acceleration, and gait phase.
Results and Conclusions
From the four trials, it was determined that the exoskeleton was successful in reducing the impact force for running and enhanced the stability for biking. This is seen in the graphs below, where the running trial shows a smaller force range with the exoskeleton, and the biking trial shows a smaller standard deviation in the force, reflecting a more constant force on the pedal and increased stability in the cycle. These results show the exoskeleton preserved normal gait mechanics, reduced impact force, and improved force consistency, suggesting potential for rehabilitation and injury prevention. For future improvements, it would be useful to make a device that is adjustable for various heights and leg sizes and test different torsion springs to optimize force reduction performance. Overall, this project gave me valuable insights into passive wearable robotics and lays the foundation for more advanced rehabilitation exoskeletons.

Trial 1 for Running: Without exoskeleton on left and with exoskeleton on right
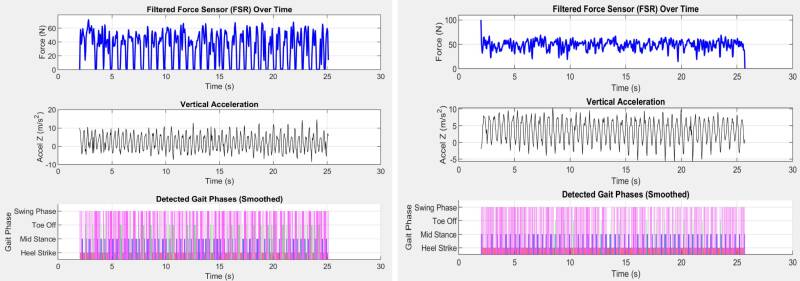
Trial 1 for Biking: Without exoskeleton on left and with exoskeleton on right
Skills
Technical/Engineering
- Wearable robotics and exoskeleton design
- Biomechanics and human gait analysis
Hardware and Embedded Systems
- Embedded systems (Arduino)
- Sensor integration (IMU, FSR)
Data and Analysis
- MATLAB signal processing and visualization
- Sensor calibration and data filtering
Research and Validation
- Experimental design and validation
- Biomechanical data analysis
Create Your Own Website With Webador